- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

En artikel til at forstå forskellen mellem stepmotorer og servoer og servomotorer
I. Forskelle mellem stepmotorer og servoer og servomotorer
Stepmotor: er det elektriske impulssignal til vinkelforskydning eller linjeforskydning af stepmotordelene til åben-sløjfekontrolelementet. Kort sagt er den afhængig af det elektriske pulssignal til at styre vinklen og antallet af omdrejninger. Så han stoler kun på pulssignalet for at bestemme, hvor meget rotation. Da der ikke er nogen sensor, kan stopvinklen afvige. Det præcise pulssignal minimerer dog afvigelsen.
Servomotor: Stol på servokontrolkredsløbet til at kontrollere motorens hastighed, gennem sensoren til at kontrollere rotationspositionen. Så positionskontrollen er meget præcis. Og rotationshastigheden er også variabel.
Servo (elektronisk servo): Servoens hovedkomponent er servomotoren. Den indeholder servomotorstyrekreds + reduktionsgearsæt. Åh ja, servomotoren har ikke reduktionsgear. Og servoen har et reduktionsgearsæt.
I tilfælde af en grænseservo er den afhængig af et potentiometer under udgangsakslen til at bestemme rorarmens styrevinkel. Servosignalstyringen er et pulsbreddemoduleret (PWM) signal, hvor en mikrocontroller nemt kan generere dette signal.
II. Trinmotorens grundlæggende princip
Sådan fungerer det:
Normalt er en motors rotor en permanent magnet, og når strømmen løber gennem statorviklingerne, producerer statorviklingerne et vektormagnetisk felt. Dette magnetfelt vil drive rotoren til at rotere med en vinkel, således at retningen af rotorens magnetfeltpar vil være den samme som retningen af statorens magnetfelt. Når statorens vektormagnetiske felt roterer med en vinkel. Rotoren roterer også i en vinkel med dette magnetfelt. For hver elektrisk input-impuls roterer motoren et vinkeltrin fremad. Dens udgangsvinkelforskydning er proportional med antallet af indgangsimpulser, og dens rotationshastighed er proportional med impulsernes frekvens. Ved at ændre rækkefølgen, hvori viklingerne aktiveres, vender motoren om. Derfor kan antallet og frekvensen af impulser og rækkefølgen af aktivering af viklingerne i hver fase af motoren styres for at styre stepmotorens rotation.
Princippet om varmeudvikling:
Normalt ser alle slags motorer, interne er jernkerne og viklingsspole. Vindingsmodstand, strøm vil producere tab, tab størrelse og modstand og strømmen er proportional med kvadratet, som ofte omtales som kobbertab, hvis strømmen ikke er standard DC eller sinusbølge, vil også producere harmoniske tab; kerne har hysterese hvirvelstrømseffekt, i det vekslende magnetfelt vil også producere tab, størrelsen af materialet, strøm, frekvens, spændingsrelateret, hvilket kaldes jerntab. Kobbertab og jerntab vil komme til udtryk i form af varmeudvikling, hvilket påvirker motorens effektivitet. Stepmotor forfølger generelt positioneringsnøjagtighed og drejningsmomentoutput, effektiviteten er relativt lav, strømmen er generelt større, og de harmoniske komponenter er høje, frekvensen af strømmen veksler med hastigheden og ændringen, så stepmotorer har generelt en varmesituation, og situationen er mere alvorlig end den generelle AC-motor.
III. Rorkonstruktion
Servoen er hovedsageligt sammensat af et hus, et printkort, en drivmotor, en gearreduktion og et positionsdetekteringselement. Dens arbejdsprincip er, at modtageren sender et signal til servoen, og IC'en på printkortet driver den kerneløse motor til at begynde at rotere, og kraften overføres til svingarmen gennem reduktionsgearet, og samtidig sender positionsdetektoren et signal tilbage for at afgøre, om den er nået frem til positioneringen eller ej. Positionsdetektoren er faktisk en variabel modstand. Når servoen roterer, ændres modstandsværdien tilsvarende, og rotationsvinklen kan kendes ved at detektere modstandsværdien. Generel servomotor er en tynd kobbertråd viklet omkring en tre-polet rotor, når strømmen strømmer gennem spolen vil generere et magnetfelt, og periferien af rotormagneten til at producere frastødning, som igen genererer rotationskraften. Ifølge fysikken er inertimomentet for et objekt direkte proportionalt med dets masse, så jo større massen af det objekt, der skal roteres, jo større er den kraft, der kræves. For at opnå hurtig rotationshastighed og lavt strømforbrug er servoen lavet af tynde kobbertråde snoet til en meget tynd hul cylinder, der danner en meget let hulrotor uden poler, og magneter er placeret inde i cylinderen, som er hulkopmotoren.
For at passe til forskellige arbejdsmiljøer findes der servoer med vandtæt og støvtæt design; og som svar på forskellige belastningskrav er der plast- og metalgear til servoer, og metalgear til servoer har generelt højt drejningsmoment og højhastigheder, med den fordel, at gearene ikke vil blive skåret på grund af for store belastninger. Servoer af højere kvalitet vil være udstyret med kuglelejer for at gøre rotationen hurtigere og mere nøjagtig. Der er forskel på et kugleleje og to kuglelejer, selvfølgelig er de to kuglelejer bedre. De nye FET-servoer bruger hovedsageligt FET (Field Effect Transistor), som har fordelen af lav intern modstand og derfor mindre strømtab end normale transistorer.
IV. Servo funktionsprincip
Fra pwm-bølgen ind i det interne kredsløb for at generere en forspænding, vil kontaktorgeneratoren gennem reduktionsgearet drive potentiometeret til at bevæge sig, så når spændingsforskellen er nul, stopper motoren for at opnå effekten af servo.
Protokollerne for servo PWM'er er alle de samme, men de seneste servoer, der vises, kan være anderledes.
Protokollen er generelt: høj niveaubredde i 0,5 ms ~ 2,5 ms for at styre servoen til at dreje gennem forskellige vinkler.
V. Hvordan servomotorer fungerer
Nedenstående figur viser et servomotorstyrekredsløb lavet med en effekt operationsforstærker LM675, og motoren er en DC servomotor. Som det kan ses af figuren, forsynes effekt operationsforstærkeren LM675 af 15V, og 15V spændingen tilføjes til in-fase indgangen på operationsforstærkeren LM675 gennem RP 1, og udgangsspændingen fra LM675 tilføjes til indgangen på servomotoren. Motoren er udstyret med en hastighedsmålingssignalgenerator til realtidsdetektering af motorhastigheden. Faktisk er hastighedssignalgeneratoren en slags generator, og dens udgangsspænding er proportional med rotationshastigheden. Spændingsudgangen fra hastighedsmålesignalgeneratoren G føres tilbage til operationsforstærkerens inverterende indgang som et hastighedsfejlsignal efter et spændingsdelerkredsløb. Spændingsværdien indstillet af hastighedskommandopotentiometeret RP1 lægges til operationsforstærkerens in-fase-indgang efter spændingsdeling med R1.R2, hvilket svarer til referencespændingen.
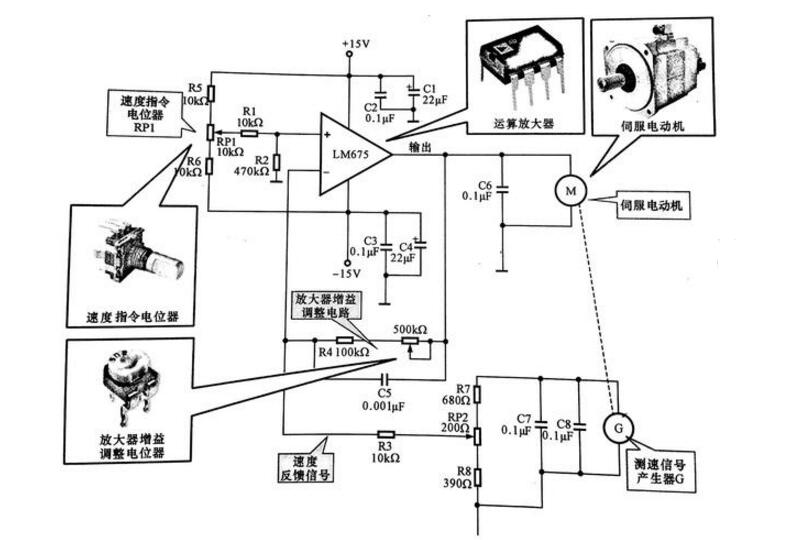
Styreskema af servomotor
Servomotor: Indikeret med bogstavet M for servomotor, det er strømkilden til drivsystemet. Operationsforstærker: angivet med kredsløbsnavnet, dvs. LM675, er et forstærkerstykke i servostyrekredsløbet, der leverer drivstrømmen til servomotoren.
Hastighedskommando potentiometer RP1: Indstiller referencespændingen for operationsforstærkeren i kredsløbet, dvs. hastighedsindstilling. Forstærkerforstærkningspotentiometer RP2: Bruges i kredsløbet til at finjustere henholdsvis forstærkerforstærkningen og størrelsen af hastighedsfeedbacksignalet.
Når motorens belastning ændres, ændres spændingen, der føres tilbage til operationsforstærkerens inverterede indgang, også, det vil sige, når motorens belastning øges, falder hastigheden, og udgangsspændingen fra hastighedssignalgeneratoren falder også, således at spændingen ved den inverterede indgang på operationsforstærkeren falder, og forskellen mellem denne spænding og referencespændingen øges, og forstærkerens udgangsspænding øges. Omvendt, når belastningen bliver mindre og motorhastigheden stiger, stiger udgangsspændingen fra hastighedsmålesignalgeneratoren, feedbackspændingen tilføjet til operationsforstærkerens inverterede indgang øges, forskellen mellem denne spænding og referencespændingen falder, operationsforstærkerens udgangsspænding falder, og motorhastigheden falder i overensstemmelse hermed, således at rotationsværdien automatisk kan stabiliseres.